品牌型号:lenovo ThinkPad X250
体系:Windows 11
软件版本:
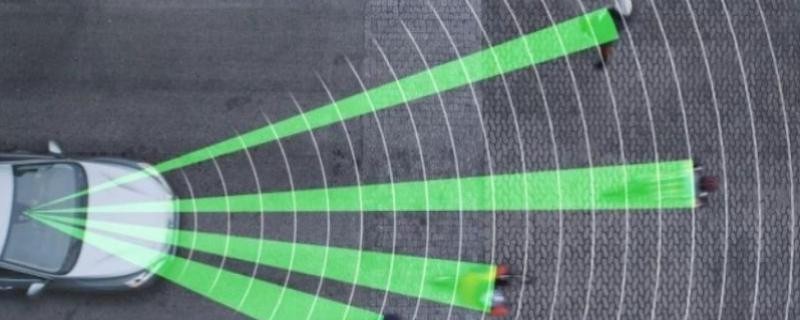
经过雷射扫描能够得到汽车四周环境的3D模子,使用相关算法比对上一帧和下一帧环境的变更能够较为简单的探测出四周的车辆和行人。
GPS、IMU和轮速等传感器给出一个初始(大要)的位置。其次,将激光雷达的局部点云信息进行特点提取,并联合初始位置获取全局坐标系下的矢量特点。最后,将上一步的矢量特点跟高精舆图的特点信息进行立室,得出切确的全世界定位。
激光雷达的工作道理是利用可见和近红外光波(多为950nm波段附近的红外光)发射、反射和接纳来探测物体。激光雷达能够探测白日或黑夜下的特定物体与车之间的距离。因为反射度的不一样,也能够区分开车道线和路面,可是无奈探测被遮挡的物体、光束无奈到达的物体,在雨雪雾气候下功能较差。